Mechanical design for robotic handling and controlled fiber winding
Carbon Fiber Bobbin Assembly System
Designed a mechanically integrated bobbin system for robotic handling and controlled carbon fiber winding, addressing key challenges in alignment, tension control, and twist prevention. The final design was recognized as a feasible and practical solution, successfully meeting client requirements for reliability, manufacturability, and system integration.

Yarn Compatibility
0.25 × 4 mm
Supports flat carbon fiber ribbon geometry
Misalignment Tolerance
±10 mm · ±10°
Maintains reliable robotic engagement under imperfect alignment
System Envelope
≤ 30 × 30 × 30 cm
Compact design for constrained robotic workspace
Subsystem Integration
3+ functions
Handling, rotation control, and yarn management combined into one assembly
Problem Definition
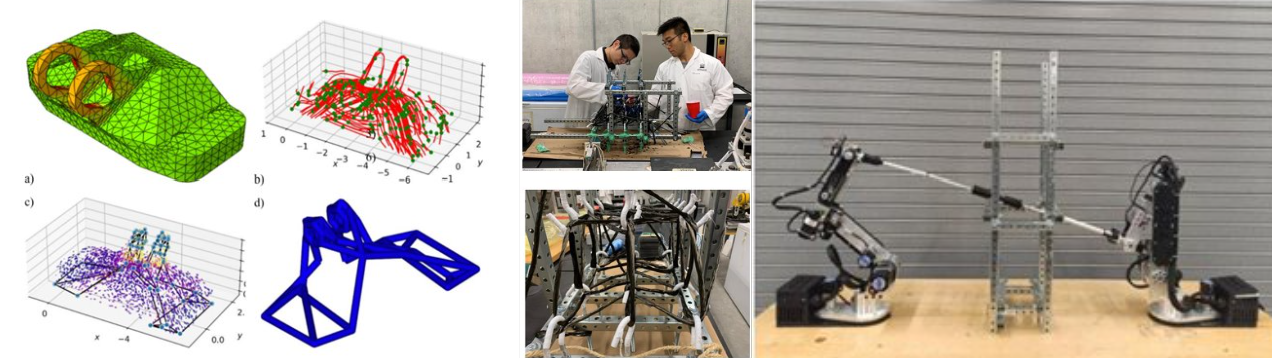
Under the research of a professor at the University of Ottawa, 3DTO manufacturing currently relies on manual weaving of carbon fiber yarn along 3D structures.
Operators control placement, tension, and orientation by hand, enabling accurate fiber deposition.
Challenge: Replace human operation with robotic systems, requiring a bobbin assembly that enables reliable fiber handling, transfer, and precise weaving.
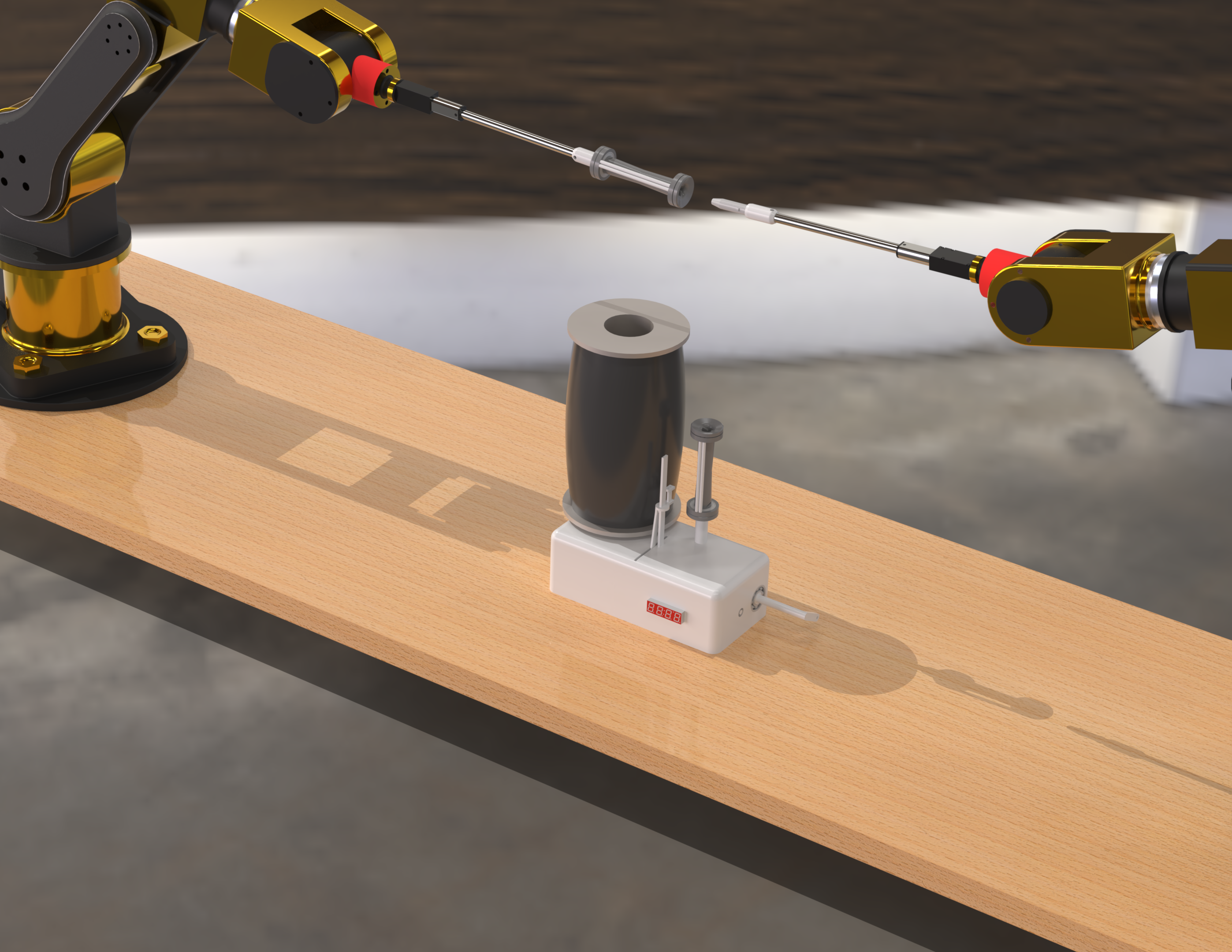
Bobbin Assembly
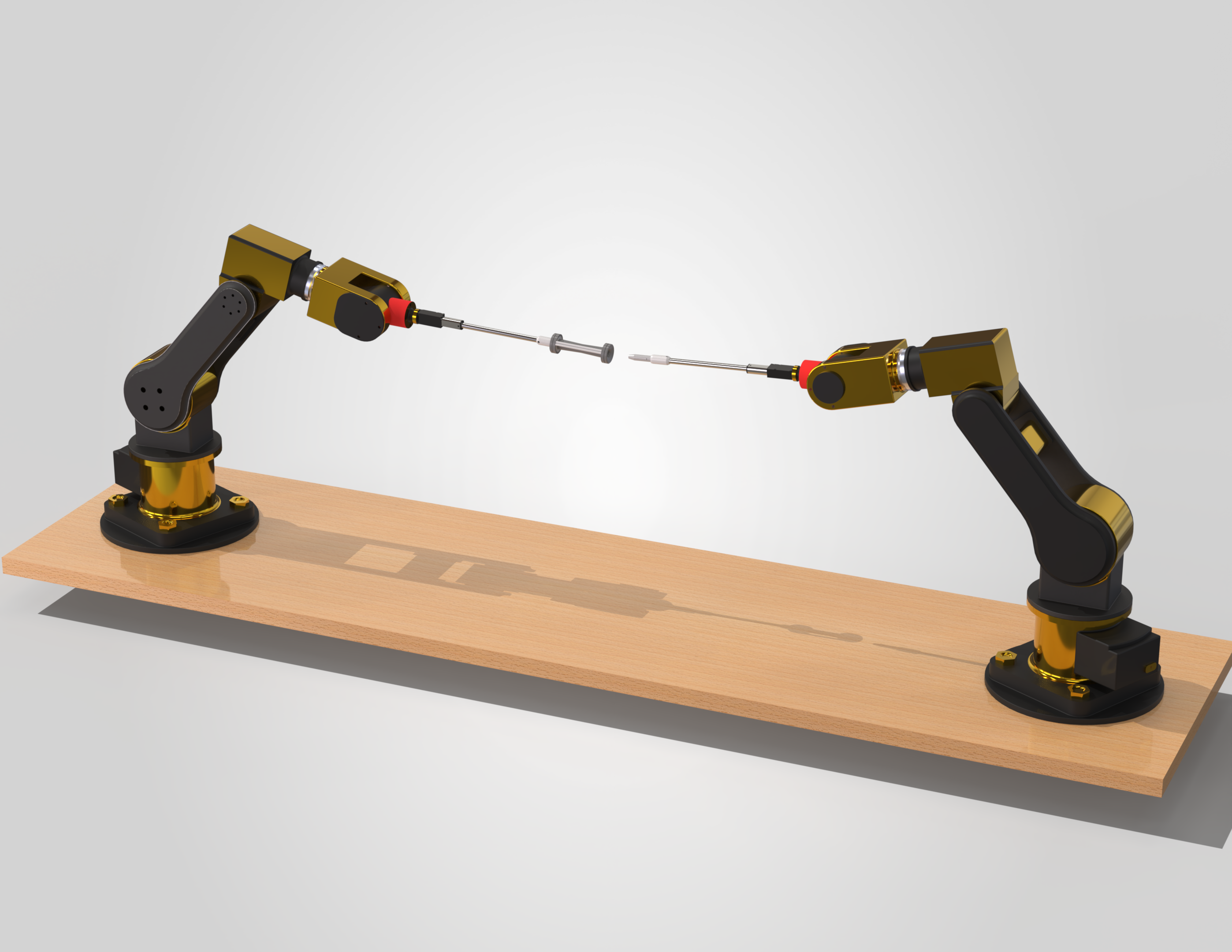
Design Overview
The bobbin assembly serves as the core of the system, enabling reliable robotic handling while maintaining controlled fiber winding behavior.
The design integrates multiple mechanical features into a compact structure, balancing functionality, simplicity, and manufacturability.

Key Design Features
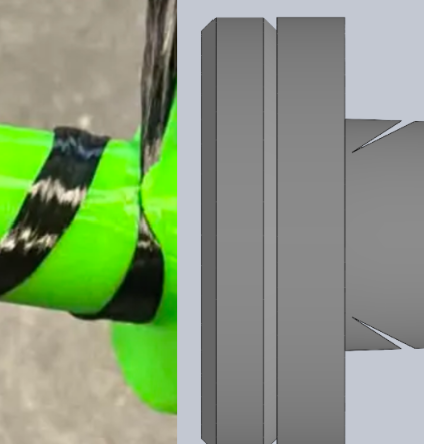
◆ Twist-Lock Interface
Enables fast, reliable engagement between robotic prehensers with tolerance to misalignment
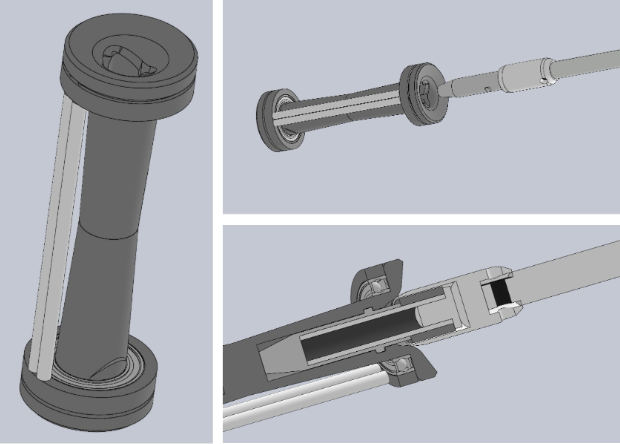
◆ One-Way Bearing
Provides controlled, unidirectional rotation for stable winding and transfer
◆ Yarn Retention & Guidance
Slit-based retention secures fiber, while rollers reduce friction and prevent damage
◆ Anti-Twist Mechanism
Maintains flat fiber orientation and eliminates torsional deformation
Engineering Focus & Contributions
- Contributed to mechanical design and subsystem integration
- Focused on simplifying complex functionality into reliable mechanical solutions
- Iterated designs based on constraints, testing, and feedback
- Ensured the system remained practical and manufacturable
Results & Outcome
- Delivered a fully integrated and feasible mechanical system
- Recognized for effective feature integration
- Addressed robotic fiber handling challenges
- Validated through working prototype
Loading Mechanism
A supporting system was developed to enable controlled yarn winding, even distribution, and accurate length measurement.
Key Features
- Even distribution via linkage motion
- Passive tension control
- Twist removal rollers
- Length metering (encoder)
Design Approach
- Simplified system design
- Mechanical reliability prioritized
- Compatible across yarn types
